 Гибкий.ру
Гибкий.ру Гибкие роторы
Учтем влияние упругой податливости неуравновешенных роторов (валов) на их прогибы и реакции опор. Рассмотрим простейший случай с одной неуравновешенной массой m, смещенной относительно оси вала на величину е (рис. 10.6). При вращении вала на неуравновешенную массу действует сила инерции Fи.
Рис. 10.6. Гибкий вал с одной неуравновешенной массой.
Под действием этой силы Fи ось вала изогнется. В плоскости действия неуравновешенной массы прогиб y равен:
у = Fи / с, (10.6)
где с – коэффициент жесткости вала.
Прогиб у связан с силой инерции следующим соотношением:
 . (10.7)
. (10.7)
Преобразовывая соотношения (8.6) и (8.7), найдем величину упругого прогиба вала:
 . (10.8)
. (10.8)
Обозначим  , (10.9)
, (10.9)
где  – критическая угловая скорость. Тогда:
– критическая угловая скорость. Тогда:

 (10.10)
(10.10)
Отсюда видно, что при ω < ωк (докритический или дорезонансный режим) прогиб вала растет с увеличением угловой скорости.
Теоретически при критической скорости  , то есть прогиб вала стремится к бесконечности. Однако, если учесть силы сопротивления, то прогиб не будет бесконечной, хотя максимальной величиной.
, то есть прогиб вала стремится к бесконечности. Однако, если учесть силы сопротивления, то прогиб не будет бесконечной, хотя максимальной величиной.
В закритическом режиме ω >> ωк прогиб у→(-е).
Центробежная сила инерции, определяемая выражением (8.7), пропорциональна суммарному дисбалансу (e y). График зависимости дисбаланса от угловой скорости показан на рис. 10.7. При ω >> ωксила инерции стремится к нулю.
Для ограничения динамических нагрузок на опоры валов желательно подбирать параметры вала, так, чтобы ω < 0,7 ωк или ω >1,4 ωк.
Рис. 10.7. Зависимость координаты неуравновешенной массы
от угловой скорости ω.
Если на валу укреплено несколько дисков, то колебательная система имеет несколько критических скоростей.
Особенность уравновешивания гибкого ротора состоит в том, что плоскости установки противовесов не могут быть выбраны произвольно.На рис. 10.8 показан гибкий ротор с неуравновешенной массой m, уравновешенный, как жесткий ротор, двумя массами 0,5 m, установленными на боковых дисках.

Рис. 10.8. Статически уравновешенный вал при покое.
Рис. 10.9. Статически уравновешенный вал при движении.
При вращении вала под влиянием упругого прогиба теоретически уравновешенный вал окажется неуравновешенным (рис. 8.17), причем противовесы могут только усугубить неуравновешенность. Поэтому для гибких валов необходимо рассчитывать координаты плоскости установки противовесов по ГОСТ 22061.
§
Если результирующая сила всех сил инерции, действующих на звенья механизма равна нулю, то такой механизм называется статически уравновешенным.
Если результирующий момент всех моментов инерции, действующих на звенья механизма равен нулю, то такой механизм называется моментно-уравновешенным.
В общем случае уравновешенным называется механизм, в котором реакции стойки не зависят от скорости движения входного звена.
Рассмотрим случай, когда необходимо статически уравновесить механизм, представленный на рис.10.10, где буквами Si обозначены центры масс звеньев буквой S – общий центр масс всех подвижных звеньев в рассматриваемом положении механизма.
Статическое уравновешивание механизма можно добиться только тогда, когда ускорение aS общего центра масс, обозначенного точкой S равно нулю, так как в этом случае результирующая сила инерции подвижных звеньев
 .
.

Рис. 10.10. Статическое уравновешивание плоского механизма
Когда центр масс совмещен с точкой А, то он становиться неподвижным. Этого добиваются с помощью двух противовесов, один из которых mп2 устанавливается на продолжении шатуна, а другой mп1 на продолжении кривошипа.
Для того чтобы рассчитать массы противовесов, применяют метод замещающих масс, суть которого заключается в том, что масса каждого звена условно разноситься по двум точкам. При этом должны выполняться следующие условия: общая масса звена должна остаться неизменной, т.е. m1 = m1A m1B ;
центр масс звена должен остаться неизменным, т.е. m1A lAS = m1B lBS .
Разнесем массу звена АВ звена по точкам А и В так, чтобы положение центра масс не изменилось (рис. 10.11).
m1 = m1A m1B ; lAB = lAS lBS ; m1A lAS = m1B lBS .

Рис. 10.11. Метод замещающих масс
Сосредоточим массу ползуна 3 в точке С.
Массу 2-го звена разнесем по шарнирам В и С, обозначив их соответственно m2B и m2C (рис. 10.12).

Рис. 10.12. К определению массы противовеса mпр2
На продолжении звена 2 поставим противовес массой mпр2 на расстоянии lпр2влево от точки В, так, чтобы общий центр тяжести звеньев 2 и 3 переместился в т. В, при этом
mпр2.lпр2= (m2C m3).lBC.
Плечо lпр2выбирают из конструктивных соображений.
Массу противовеса, установленного на звене АВ найдем из условия (см. рис. 10.13):
mпр1.lпр1= (m1B mпр2 m2В m2C m3).lAB.
После всех указанных мероприятий, центр масс всех подвижных звеньев механизма переместиться в точку А.

Рис. 10.13. К определению массы противовеса mпр1
Однако не всегда конструктивно возможно установить противовес на продолжении шатуна. В этом случае ограничиваются установкой только одного противовеса на звене 1, как показано на рис. 10.14. В этом случае mпр1.lпр1= (m1B m2В).lAB , центр масс системы смещают на линию АС. В этом случае механизм становится частично статически уравновешенным.
Рис. 10.14. Частично статически уравновешенный механизм
Такой механизм нежелательно устанавливать на высоком фундаменте, т.к. главный вектор сил инерции создает опрокидывающий момент, что недопустимо.
В четырехшарнирном механизме (рис.10.15) центр масс системы разноситься по точкам А и D, а противовесы mпр1 и mпр2устанавливаются на продолжении звеньев 1 и 3.
Уравновешивание механизмов может быть осуществлено также путём присоединения к основному одного или нескольких дополнительных механизмов (рис. 10. 16).

Рис. 10.15. Уравновешивание четырехшарнирного механизма
На рис. 10.16,а показано частичное уравновешивание кривошипно-ползунного механизма, а на рис.10.16,б полное уравновешивание.

Рис.10.16. Уравновешивание кривошипно-ползунного механизма: а – частичное,
б – полное уравновешивание механизма.
§
Виброизоляция машины, возбуждающей колебания от окружающих объектов (и наоборот – вибрирующих объектов от изолируемого прибора), достигается путем ослабления связей этой машины с другими механическими системами. Ослабление этих связей обеспечивается введением упругих дополнительных звеньев и демпферов между основанием и машиной (рис. 10.17,слева).

Рис. 10.17. Виброизолятор с одной степенью свободы
Динамическая модель такого виброизолятора показана на рис. 10.17 справа.
В машине с массой m действует периодически возмущающая сила
 .
.
Виброизоляция осуществляется пружиной с жесткостью с, связывающей машину с основанием. Определим динамическую нагрузку  в упругой связи и амплитуду колебаний массы m машины в зависимости от жесткости пружины.
в упругой связи и амплитуду колебаний массы m машины в зависимости от жесткости пружины.
Уравнение движения массы  запишем в виде
запишем в виде
 . (10.11)
. (10.11)
Решая это уравнение относительно х, получаем:

 ;
;  , (10.12)
, (10.12)
где x0 – амплитуда перемещений массы; F – амплитуда динамической нагрузки, передаваемой на основание; k – частота собственных колебаний равная
 . (10.13)
. (10.13)
Графически зависимость амплитуды x0 от частоты вынужденных колебаний ω показана на рис. 10.18. Из указанного графика видно, что при частоте вынужденных колебании ω более  амплитуда динамической нагрузки, передаваемой на основание, и амплитуда колебаний машины падает с увеличением ω.
амплитуда динамической нагрузки, передаваемой на основание, и амплитуда колебаний машины падает с увеличением ω.

Рис. 10.18. Зависимость амплитуды x0 перемещений массы m машины
в упругой связи виброгасителя.
Из выражений (10.11…10.13), видно, что уменьшение вибрации машины можно достичь путем снижения жесткости упругой связи и увеличения массы машины.
§
Наиболее распространенным устройствами для гашения колебаний являются динамические гасители колебаний. Динамическая модель такой механической системы с установленным на ней виброгасителем показана на рис. 10.19.
При работе машины с динамическим виброгасителем энергия колебаний механической системы с массой mпередается гасителю с массой m2, настроенному на частоту возмущающей силы. Гаситель m2 при этом колеблется с большой амплитудой, а машина с массой m остается неподвижной. Гаситель колебаний массы m состоит из дополнительной массы m1, соединенной с основной массой  посредством упругого элемента с жесткостью с1.
посредством упругого элемента с жесткостью с1.

Рис. 10.19. Динамический виброгаситель
Уравнения движения масс m и m1 указанной двухмассовой системы запишем в виде
 . (10.14)
. (10.14)
Решение системы (10.14) относительно координаты х массы m можно представить в виде:
 .
.
Из этого выражения видно что, при ω2 = с1 / m1х = 0, т.е. масса m становиться неподвижной. Такое состояние системы называется антирезонансом.
Для подбора жесткости с1 виброгасителя задаются его массой m1.
Как правило, m1 = (0,1…0,2) m. Жесткость виброгасителя рассчитывают по формуле с1 = ω2m . Графическая зависимость амплитуды колебаний массы m от частоты возмущающей силы ωпредставлена на рис.10.20.
Недостатки рассмотренного виброгасителя, выполненного по схеме (рис. 10.19), является фиксированная частота возмущающей силы  . Только при такой частоте действие виброгасителя эффективно.
. Только при такой частоте действие виброгасителя эффективно.

Рис. 10.20. Зависимость амплитуды колебаний массы m
от частоты возмущающей силы ω.
Сравнительно небольшое отклонение частоты ω может привести к увеличению амплитуды колебаний основной массы. Кроме того, в двухмассовой системе с виброгасителем существуют две резонансные частоты ω1 и ω2. Следовательно, в машине, снабженной виброгасителем, повышается вероятность возникновения резонансного режима.
§
ЛЕКЦИЯ 17-18
Л-17Краткое содержание: Назначение и область применения кулачковых механизмов, основные преимущества и недостатки. Классификация кулачковых механизмов. Основные параметры кулачковых механизмов. Структура кулачкового механизма. Циклограмма работы кулачкового механизма.
Л-18 Краткое содержание: Типовые законы движения толкателя. Критерии работоспособности механизма и угол давления при передаче движения в высшей кинематической паре. Постановка задачи метрического синтеза. Этапы синтеза. Метрический синтез кулачкового механизма с поступательно движущимся толкателем.
Контрольные вопросы.
Кулачковые механизмы:
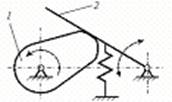
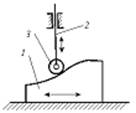
Кулачковым называется трехзвенный механизм с высшей кинематической парой входное звено, которого называется кулачком, а выходное – толкателем (или коромыслом). Часто для замены в высшей паре трения скольжения трением качения и уменьшения износа, как кулачка, так и толкателя, в схему механизма включают дополнительное звено – ролик и вращательную кинематическую пару. Подвижность в этой кинематической паре не изменяет передаточных функций механизма и является местной подвижностью.
Назначение и область применения:
Кулачковые механизмы предназначены для преобразования вращательного или поступательного движения кулачка в возвратно-вращательное или возвратно-поступательное движение толкателя. При этом в механизме с двумя подвижными звеньями можно реализовать преобразование движения по сложному закону. Важным преимуществом кулачковых механизмов является возможность обеспечения точных выстоев выходного звена. Это преимущество определило их широкое применение в простейших устройствах цикловой автоматики (распределительный вал) и в механических счетно-решающих устройствах (арифмометры, календарные механизмы). Кулачковые механизмы можно разделить на две группы. Механизмы первой обеспечивают перемещение толкателя по заданному закону движения. Механизмы второй группы обеспечивают только заданное максимальное перемещение выходного звена – ход толкателя. При этом закон, по которому осуществляется это перемещение, выбирается из набора типовых законов движения в зависимости от условий эксплуатации и технологии изготовления.
Классификация кулачковых механизмов:
Кулачковые механизмы классифицируются по следующим признакам:
- по расположению звеньев в пространстве
- по движению кулачка
- вращательное
- поступательное
- по движению выходного звена
- возвратно-поступательное (с толкателем)
- возвратно-вращательное (с коромыслом)
- по наличию ролика
- по виду кулачка
- дисковый (плоский)
- цилиндрический
- по форме рабочей поверхности выходного звена
- плоская
- заостренная
- цилиндрическая
- сферическая
- по способу замыкания элементов высшей пары



При силовом замыкании удаление толкателя осуществляется воздействием контактной поверхности кулачка на толкатель (ведущее звено – кулачок, ведомое – толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины или силы веса толкателя, при этом кулачок не является ведущим звеном. При геометрическом замыкании движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении – воздействием внутренней рабочей поверхности кулачка на толкатель. На обеих фазах движения кулачок ведущее звено, толкатель – ведомое.
Рис. 17.1
Циклограмма работы кулачкового механизма
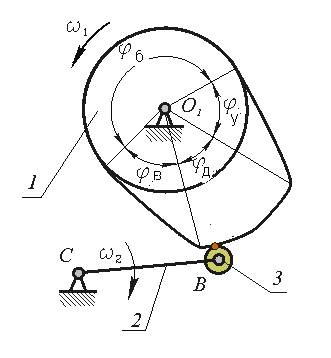
Рис. 2
Большинство кулачковых механизмов относится к цикловым механизмам с периодом цикла равным 2p. В цикле движения толкателя в общем случае можно выделить четыре фазы (рис. 2): удаления из самого близкого (по отношению к центру вращения кулачка) в самое дальнее положение, дальнего стояния (или выстоя в самом дальнем положении), возвращения из самого дальнего положения в самое близкое и ближнего стояния (выстоя в самом ближнем положении). В соответствии с этим, углы поворота кулачка или фазовые углы делятся на:
- угол удаления jy
- угол дальнего стояния jд
- угол возвращения jв
- угол ближнего стояния jб.
Сумму φу φд φв называют рабочим углом и обозначают φр. Следовательно,
φу φд φв = φр.
Основные параметры кулачкового механизма
Кулачок механизма характеризуется двумя профилями: центровым (или теоретическим) и конструктивным. Под конструктивным понимается наружный рабочий профиль кулачка. Теоретическим или центровым называется профиль, который в системе координат кулачка описывает центр ролика (или скругления рабочего профиля толкателя) при движении ролика по конструктивному профилю кулачка. Фазовым называется угол поворота кулачка. Профильным углом di называется угловая координата текущей рабочей точки теоретического профиля, соответствующая текущему фазовому углу ji.
В общем случае фазовый угол не равен профильному ji¹di.
На рис. 17.2 изображена схема плоского кулачкового механизма с двумя видами выходного звена: внеосным с поступательным движением и качающимся (с возвратно-вращательным движением). На этой схеме указаны основные параметры плоских кулачковых механизмов.
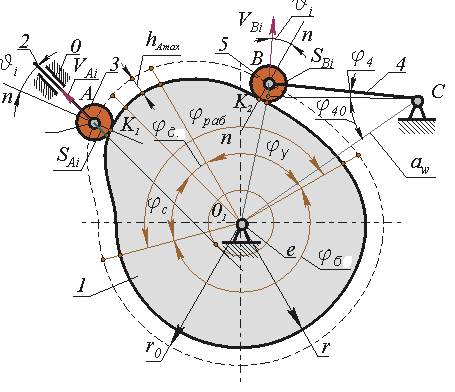
Рис. 17.2
На рисунке 17.2:
| SAi и SВi | – текущие значения перемещения центров роликов |
| j40 | – начальная угловая координата коромысла |
| j4 | – текущее угловое перемещение коромысла |
| hAmax | – максимальное перемещение центра ролика |
| r0 | – радиус начальной шайбы центрового профиля кулачка |
| r | – радиус начальной шайбы конструктивного профиля кулачка |
| rp | – радиус ролика (скругления рабочего участка толкателя) |
| Ji | – текущее значение угла давления |
| aw | – межосевое (межцентровое) расстояние |
| e | – внеосность (эксцентриситет) |
Теоретический профиль кулачка обычно представляется в полярных координатах зависимостью ri = f(di),
где ri – радиус-вектор текущей точки теоретического или центрового профиля кулачка.
Структура кулачковых механизмов
Рис. 17.3
| Wпл = 3×n – 2×pн – 1×pвп | |
| n = 3, pн = 3, pвп = 1,Wпл = 3×3 – 2×3 – 1×1 = 2 = 1 1 W0 = 1, Wм = 1 | n = 2, pн = 2, pвп = 1,Wпл = 3×2 – 2×2 – 1×1 = 1 ;W0 = 1 ; Wм = 0. |
В кулачковом механизме с роликом имеется две подвижности разного функционального назначения: W0 = 1 – основная подвижность механизма по которой осуществляется преобразование движения по заданному закону, Wм = 1 – местная подвижность, которая введена в механизм для замены в высшей паре трения скольжения трением качения.
Кинематический анализ кулачкового механизма
Кинематический анализ кулачкового механизма может быть проведен любым из описанных выше методов. При исследовании кулачковых механизмов с типовым законом движения выходного звена наиболее часто применяется метод кинематических диаграмм. Для применения этого метода необходимо определить одну из кинематических диаграмм. Так как при кинематическом анализе кулачковый механизм задан, то известна его кинематическая схема и форма конструктивного профиля кулачка. Построение диаграммы перемещений проводится в следующей последовательности (для механизма с внеосным поступательно движущимся толкателем):
- строится, касательно к конструктивному профилю кулачка, семейство окружностей с радиусом, равным радиусу ролика; соединяются центры окружностей этого семейства плавной кривой и получается центровой или теоретический профиль кулачка
- в полученный центровой профиль вписываются окружности радиусов r0 и r0 hAmax,определяется величина эксцентриситета е
- по величине участков, не совпадающих с дугами окружностей радиусов r0 и r0 hAmax , определяются фазовые углы jраб , jу , jдв и jс
- дуга окружности r, соответствующая рабочему фазовому углу, разбивается на несколько дискретных участков; через точки разбиения проводятся касательно к окружности радиуса эксцентриситета прямые линии (эти линии соответствуют положениям оси толкателя в его движении относительно кулачка)
- на этих прямых измеряются отрезки расположенные между центровым профилем и окружностью радиуса r0 ; эти отрезки соответствуют перемещениям центра ролика толкателя SВi
по полученным перемещениям SВiстроится диаграмма функции положения центра ролика толкателя SВi= f(j1)
Рис.17.4
На рис. 17.4 показана схема построения функции положения для кулачкового механизма с центральным (е=0) поступательно движущимся роликовым толкателем.
Типовые законы движения толкателя.
При проектировании кулачковых механизмов выбирается закон движения толкателя из набора типовых.
Типовые законы движения делятся на законы с жесткими и мягкими ударами и законы безударные. С точки зрения динамических нагрузок, желательны безударные законы. Однако кулачки с такими законами движения технологически более сложны, так как требуют более точного и сложного оборудования, поэтому из изготовление существенно дороже. Законы с жесткими ударами имеют весьма ограниченное применение и используются в неответственных механизмах при низких скоростях движения и невысокой долговечности. Кулачки с безударными законами целесообразно применять в механизмах с высокими скоростями движения при жестких требованиях к точности и долговечности. Наибольшее распространение получили законы движения с мягкими ударами, с помощью которых можно обеспечить рациональное сочетание стоимости изготовления и эксплуатационных характеристик механизма.
После выбора вида закона движения, обычно методом кинематических диаграмм, проводят геометро-кинематическое исследование механизма и определяют закон перемещения толкателя и закон изменения за цикл первой передаточной функции (см. лекцию 3 – метод кинематических диаграмм).
Таблица 17.1
К экзамену
Критерии работоспособности и угол давления при передаче движения в высшей кинематической паре.
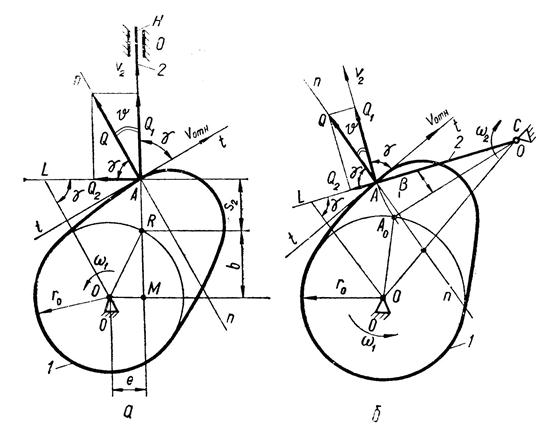
Угол давления  определяет положение нормали п-п в высшей КП относительно вектора скорости и контактной точки ведомого звена (рис. 3, а, б). Его величина определяется размерами механизма, передаточной функцией
определяет положение нормали п-п в высшей КП относительно вектора скорости и контактной точки ведомого звена (рис. 3, а, б). Его величина определяется размерами механизма, передаточной функцией  и перемещения толкателя S.
и перемещения толкателя S.
Угол передачи движения γ – угол между векторами υ2 и υотн абсолютной и относительной (по отношению к кулачку) скоростей той точки толкателя, которая находится в точке контакта А (рис. 3, а, б):
 .
.
Если пренебречь силой трения между кулачком и толкателем, то силой, приводящей в движение толкатель (движущей силой), является давление Q кулачка, приложенное к толкателю в точке А и направленное по общей нормали п-п к профилям кулачка и толкателя. Разложим силу Q на взаимно перпендикулярные составляющие Q1и Q2, из которых первая направлена по направлению скорости υ2. Сила Q1перемещает толкатель, преодолевая при этом все полезные (связанные с выполнением технологических задач) и вредные (силы трения) сопротивления, приложенные к толкателю. Сила Q2увеличивает силы трения в кинематической паре, образованной толкателем и стойкой.
Очевидно, что с уменьшением угла γ сила Q1 уменьшается, а сила Q2 увеличивается. При некотором значении угла γможет оказаться, что сила Q1не сможет преодолеть все сопротивления, приложенные к толкателю, и механизм не будет работать. Такое явление называют заклиниванием механизма, а угол γ, при котором оно имеет место, называют углом заклинивания γзакл .
При проектировании кулачкового механизма задают допускаемое значение угла давления доп , обеспечивающее выполнения условия γ ≥ γ min > γ закл,т. е. текущий угол γ ни в одном положении кулачкового механизма не должен быть меньше минимального угла передачи γ min и значительно превосходить угол заклинивания γзакл .
Для кулачковых механизмов с поступательно движущимся толкателем рекомендуется γ min = 60° (рис. 3, а)и γmin = 45° – механизмов с вращающимся толкателем (рис. 3, б).
Определение основных размеров кулачкового механизма.
Размеры кулачкового механизма определяются с учетом допустимого угла давления в высшей паре.
Условие, которому должно удовлетворять положение центра вращения кулачка О1: углы давления на фазе удаления во всех точках профиля должны быть меньше допустимого значения. Поэтому графически область расположения точки О1 может быть определена семейством прямых проведенных под допустимым углом давления к вектору возможной скорости точки центрового профиля, принадлежащей толкателю. Графическая интерпретация вышесказанного для толкателя и коромысла дана на рис. 17.5. На фазе удаления строится диаграмма зависимости SB=f(j1). Так как при коромысле точка В движется по дуге окружности радиуса lBC , то для механизма с коромыслом диаграмма строится в криволинейных координатах. Все построения на схеме, проводятся в одном масштабе, то есть ml= mVq= mS.
Постановка задачи метрического синтеза
При синтезе кулачкового механизма, как и при синтезе любого механизма, решается ряд задач, из которых в курсе ТММ рассматриваются две:
выбор структурной схемы и определение основных размеров звеньев механизма (включая профиль кулачка).
Этапы синтеза
Первый этап синтеза – структурный. Структурная схема определяет число звеньев механизма; число, вид и подвижность кинематических пар; число избыточных связей и местных подвижностей. При структурном синтезе необходимо обосновать введение в схему механизма каждой избыточной связи и местной подвижности. Определяющими условиями при выборе структурной схемы являются: заданный вид преобразования движения, расположение осей входного и выходного звеньев. Входное движение в механизме преобразуется в выходное, например, вращательное во вращательное, вращательное в поступательное и т.п. Если оси параллельны, то выбирается плоская схема механизма. При пересекающихся или перекрещивающихся осях необходимо использовать пространственную схему. В кинематических механизмах нагрузки малы, поэтому можно использовать толкатели с заостренным наконечником. В силовых механизмах для повышения долговечности и уменьшения износа в схему механизма вводят ролик или увеличивают приведенный радиус кривизны контактирующих поверхностей высшей пары.
Второй этап синтеза – метрический. На этом этапе определяются основные размеры звеньев механизма, которые обеспечивают заданный закон преобразования движения в механизме или заданную передаточную функцию. Как отмечалось выше, передаточная функция является чисто геометрической характеристикой механизма, а, следовательно, задача метрического синтеза чисто геометрическая задача, независящая от времени или скоростей. Основные критерии, которыми руководствуется проектировщик, при решении задач метрического синтеза: минимизация габаритов, а , следовательно, и массы; минимизация угла давления в вышей паре; получение технологичной формы профиля кулачка.
Постановка задачи метрического синтеза
Дано:
Структурная схема механизма; закон движения выходного звена SB=f(j1)
или его параметры – hB , jраб = jу jдв jс , допустимый угол давления–|J|
Дополнительная информация: радиус ролика rр , диаметр кулачкового вала dв , эксцентриситет е(для механизма с толкателем движущимся поступательно), межосевое расстояние awи длина коромысла lBC(для механизма с возвратно-вращательным движением выходного звена).
Определить:
радиус начальной шайбы кулачка r0; радиус ролика r0 ; координаты центрового и конструктивного профиля кулачка ri = f(di)
и, если не задано, то эксцентриситет е и межосевое расстояние aw.
Алгоритм проектирования кулачкового механизма по допустимому углу давления
Рис.17.5
| Механизм с толкателем | Механизм с коромыслом |
Выбор центра возможен в заштрихованных областях. Причем выбирать нужно так, чтобы обеспечить минимальные размеры механизма. Минимальный радиус r1* получим, если соединим вершину полученной области, точку О1*, с началом координат. При таком выборе радиуса в любой точке профиля на фазе удаления угол давления будет меньше или равен допустимому. Однако кулачок необходимо при этом выполнить с эксцентриситетом е*. При нулевом эксцентриситете радиус начальной шайбы определится точкой Ое0 . Величина радиуса при этом равна re0, то есть значительно больше минимального. При выходном звене – коромысле, минимальный радиус определяется аналогично. Радиус начальной шайбы кулачка r1aw при заданном межосевом расстоянии aw, определяется точкой О1aw , пересечения дуги радиуса aw с соответствующей границей области. Обычно кулачок вращается только в одном направлении, но при проведении ремонтных работ желательно иметь возможность вращения кулачка в противоположном направлении, то есть обеспечить возможность реверсивного движения кулачкового вала. При изменении направления движения, фазы удаления и сближения, меняются местами. Поэтому для выбора радиуса кулачка, движущегося реверсивно, необходимо учитывать две возможных фазы удаления, то есть строить две диаграммы SВ= f(j1) для каждого из возможных направлений движения. Выбор радиуса и связанных с ним размеров реверсивного кулачкового механизма проиллюстрирован схемами на рис. 17.6.
На этом рисунке:
r1 – минимальный радиус начальной шайбы кулачка;
r1е – радиус начальной шайбы при заданном эксцентриситете;
r1aw – радиус начальной шайбы при заданном межосевом расстоянии;
aw0 – межосевое расстояние при минимальном радиусе.
Выбор радиуса ролика
§
При выборе радиуса ролика руководствуются следующими соображениями:
- Ролик является простой деталью, процесс обработки которой несложен (вытачивается, затем термообрабатывается и шлифуется). Поэтому на его поверхности можно обеспечить высокую контактную прочность. В кулачке, из-за сложной конфигурации рабочей поверхности, это обеспечить сложнее. Поэтому обычно радиус ролика rр меньше радиуса начальной шайбы конструктивного профиля r и удовлетворяет соотношению rр < 0.4× r0, где r0 – радиус начальной шайбы теоретического профиля кулачка. Выполнение этого соотношения обеспечивает примерно равную контактную прочность как для кулачка, так и для ролика. Ролик обладает большей контактной прочностью, но так как его радиус меньше, то он вращается с большей скоростью и рабочие точки его поверхности участвуют в большем числе контактов.
- Конструктивный профиль кулачка не должен быть заостренным или срезанным. Поэтому на выбор радиуса ролика накладывается ограничение
rр <0.7 ×rmin , где rmin – минимальный радиус кривизны теоретического профиля кулачка (см. рис. 17.7).

Рис.17.7
- Рекомендуется выбирать радиус ролика из стандартного ряда диаметров в диапазоне rp = (0.2 … 0.35) × r0 . При этом необходимо учитывать, что увеличение радиуса ролика увеличивает габариты и массу толкателя, ухудшает динамические характеристики механизма (уменьшает его собственную частоту). Уменьшение радиуса ролика увеличивает габариты кулачка и его массу; частота вращения ролика увеличивается, его долговечность снижается.
- При выборе радиуса скругления рабочего участка толкателя подход к решению задачи несколько иной. Так как в этом случае нет местной подвижности, заменяющей скольжение качением, то на толкателе имеется очень небольшой рабочий участок, точки которого скользят относительно рабочей поверхности кулачка, то есть износ поверхности толкателя более интенсивный. Увеличение радиуса скругления не увеличивает габаритов и массы толкателя, а размеры конструктивного профиля кулачка уменьшаются. Поэтому этот радиус можно выбирать достаточно большим. Часто применяются толкатели с плоской рабочей поверхностью кулачка (радиус скругления равен бесконечности). В этом случае угол давления в высшей паре при поступательном движении толкателя есть величина постоянная и равная углу между нормалью к плоскости толкателя и вектором скорости его движения на фазе удаления. Определение размеров по углу давления при этом невозможно. Радиус кулачка при этом определяют по контактным напряжениям, а форму профиля проверяют по условию выпуклости (1).
3.Построение центрового и конструктивного профилей кулачка.
3.1.Для кулачкового механизма с внеосным толкателем:
Построение профилей кулачка проводится в следующей последовательности:
- выбирается масштаб построения ml, мм/м
- из произвольного центра проводятся в масштабе окружности с радиусами r0 и е.
- из произвольной точки на окружности r0 в направлении –j1откладываeтся рабочий угол, угол делятся на n интервалов.
- из каждой точки деления касательно к окружности радиусом е проводятся прямые.
- на этих прямых от точки пересечения с окружностью r0 откладываются в масштабе ml соответствующие перемещения толкателя SВi.
- полученные точки соединяются плавной кривой, образуя центровой профиль кулачка.
- проводятся из произвольных точек выбранных равномерно по центровому профилю кулачка дуги окружностей радиуса rp.
- конструктивный профиль кулачка получаем как огибающую к множеству положений ролика толкателя.
3.1.Для кулачкового механизма с коромыслом:
Построение профилей кулачка проводится в следующей последовательности:
- выбирается масштаб построения ml,мм/м,
- из произвольного центра проводятся в масштабе окружности с радиусами r0и aw,
из произвольной точки на окружности aw в направлении –j1откладываeтся рабочий угол, угол делится на n интервалов, из каждой точки деления радиусом lBC проводятся дуги.

Рис.17.8

Рис.17.9
- на этих дугах от точки пересечения с окружностью r0 откладываются в масштабе ml соответствующие перемещения толкателя SВi.
- полученные точки соединяются плавной кривой, образуя центровой профиль кулачка.
- проводятся из произвольных точек выбранных равномерно по центровому профилю кулачка дуги окружностей радиуса rр.
- конструктивный профиль кулачка получаем как огибающую к множеству положений ролика толкателя.
Контрольные вопросы по теме «Синтез кулачковых механизмов».
1. Назовите особенности кулачковых механизмов, обусловившие их широкое применение в различных машинах и приборах
2. Каковы недостатки кулачковых механизмов?
3. Изобразите схемы наиболее распространенных плоских и пространственных кулачковых механизмов
4. Как подразделяются кулачковые механизмы по способу замыкания высшей пары?
5. Перечислите основные фазы движения толкателя кулачкового механизма и соответствующие им углы поворота кулачка
6. Расскажите об основных этапах синтеза кулачковых механизмов.
7. Какие законы движения толкателя рационально применять в быстроходных кулачковых механизмах и почему?
8. Как определить положение центра вращения кулачка в механизме с поступательно двигающемся толкателем при заданном допустимом угле давления?
9. Как определить положение центра вращения кулачка в механизме с качающемся толкателем при заданном допустимом угле давления?
10. Из каких соображений выбирается величина радиуса ролика кулачкового механизма?
11. Как по теоретическому (центровому) профилю кулачка построить действительный (конструктивный) профиль?